¡Bienvenidos jóvenes Bachilleres!, que cursan el quinto semestre del periodo escolar 2022-2023, en la asignatura de "TEMAS SELECTOS FÍSICA I" , en el Colegio de Bachilleres del Estado de Michoacán, plantel Tarímbaro.
Este espacio nos será de gran utilidad para abordar y reforzar tus conocimientos previamente adquiridos o construidos en el aula, en donde utilizaras las nuevas herramientas y recursos tecnológicos que están al alcance de tus manos, espero te sea de utilidad.
Aplica
las condiciones de equilibrio que tiene los diferentes sistemas de fuerza,
elaborando prototipos u observando cuerpos en equilibrio, para analizar sus
características en situaciones prácticas en su entorno y así favorecer su
pensamiento crítico en la toma de decisiones.
Conocimientos.
Sistemas de fuerzas:
ØCoplanares concurrentes.
ØCoplanares distribuidas.
Tipos de equilibrio:
Ø
Traslación.
üPrimera condición de equilibrio.
ØRotación.
üMomento o torque.
üSegunda condición de equilibrio.
üLocalización del eje de rotación.
ØLocalización del centro de gravedad de cuerpos regulares y homogéneos.
BLOQUE II
DINÁMICA ROTACIONAL.
Propósito del bloque.
Utiliza el sistema giratorio como elementos de análisis para entender
sus principios y explicar las causas de este tipo de movimiento presente en su
contexto, mostrando disposición al trabajo colaborativo, metódico y organizado.
Conocimientos.
ØAceleración
y fuerza centrípeta,
ØMomento de
inercia.
ØRelación
entre momento de torsión y aceleración angular.
ØTrabajo
rotacional energía cinética rotacional.
ØMomento
angular conservación del momento angular.
BLOQUE III
MÁQUINAS SIMPLES.
Propósito del bloque.
Utiliza prototipos de máquinas simples como modelo de análisis,
mostrando disposición al trabajo colaborativo, metódico y organizando,
encontrando las ventajas de su uso y eficiencia en diferentes contextos.
Conocimientos.
Concepto de máquina:
ØVentaja mecánica ideal.
ØVentaja mecánica real.
ØEficiencia.
Tipos de máquinas simples:
ØPolea.
ØPlano inclinado.
ØPalanca.
ØCuña.
ØTornillo.
ØRueda eje.
üTransmisión de banda simple.
üEngranes.
BLOQUE IV
IMPULSO Y CANTIDAD DE MOVIMIENTO.
Propósito del bloque.
Examina los fenómenos físicos que presentan colisiones, explicando la relación
entre impulso, y cantidad de movimiento y la ley de la conservación, para comprender
el comportamiento de los cuerpos, trabajando colaborativamente y tomando decisiones
de manera consiente e informada asumiendo las consecuencias que generan dichos
eventos en cualquier contexto.
Conocimientos.
Definiciones:
ØImpulso.
ØCantidad de movimiento.
Relación entre impulso y cantidad de
movimiento.
Ley de la conservación de la cantidad de
movimiento,
En el estudio de la física se trabajan generalmente con dos
tipos de magnitudes, mismas que las podemos encontrar en nuestra vida
cotidiana, este tipo de magnitudes son:
· Escalares
· Vectoriales.
Las magnitudes
escalares: son
aquellas que quedan perfectamente definidas con solo indicar su cantidad
expresada en números y una cantidad de medida.
En el caso específico de la Física son ejemplos de magnitudes escalares el tiempo, la masa, el volumen, la distancia, la rapidez, etcétera.
Se le llama Cantidad Escalar o “MÓDULO” al resultado de medir una magnitud escalar. Dicho resultado estará completo si se le representa a través de un número acompañado de la unidad que se utilizó para efectuar la medición.
Ejemplos:
a) 25 hr.
b) 53 Kg. c) 18 lt.
d) 122 m.
e) 250 Km/hr
Las magnitudes
vectoriales: A
diferencia, de las cantidades escalares, las cantidades vectoriales se caracterizan
por tener dirección, sentido, además de su magnitud. Éstas constan de un
número, una unidad y una dirección con respecto a un plano de referencia.
Las cantidades vectoriales también son al resultado de la medición de una magnitud física, pero en este caso para que dicho resultado quede bien definido además de expresar su módulo hay que indicar la dirección y sentido que tiene la magnitud física medida.
Ejemplos:
1) EL DESPLAZAMIENTO: Un borrego que camina 18 metros hacia el sur de su corral.
2) LA VELOCIDAD: Un alumno del COBACH que vive al oeste, y cerca de su plantel, corre a una velocidad de 3 metros sobre segundo para no llegar tarde a su primera clase; y es de Educación Física.
3) FUERZA: Para sacar un carro que cayó a una zanja, la grúa que se contrate para sacarlo debe de jalar de él con una fuerza de 450 Newton hacia el norte.
Si relacionamos y sobreponemos los puntos cardinales con los ejes cartesianos de la siguiente forma: Los ejemplos anteriores se pueden expresar simbólicamente como:
1) d =18 m 270°
2) v = 3 m /s 180°
3) f = 450 n 90°
Las características de
los vectores son:
1.Punto de aplicación: es el punto de
origen sobre el que actúa el vector.
2. Módulo: se refiere al tamaño del vector.
Para conocer el módulo se debe hallar el punto de aplicación y el extremo del
vector.
3. Dirección: es la orientación de la recta en la
que se ubica el vector. La dirección puede ser vertical, horizontal y oblicua.
4. Sentido: se determina a partir de la flecha ubicada en
uno de los extremos del vector. La orientación puede ser horizontal hacia la
izquierda o derecha, vertical hacia arriba o abajo, y por último, inclinada
ascendente o descendente.
VECTORES COPLANARES Y NO COPLANARES, VECTORES COLINEALES VECTORES CONCURRENTES.
Para abordar adecuadamente los temas de la estática, es importante que recobres los conocimientos de temas previos como el de vectores, como se esta planteando en este espacio, te comparto los siguientes ejercicios de vectores, con la finalidad de que posteriormente se te facilite los temas de la primera y segunda condición de equilibrio.
Les comparto algunos ejemplos de vectores, con el propósito de que recuperes los conocimientos previos del tema, mismos que se abordaron en Física I. .... Mtro. Piñón...
La Estática es la parte de la
Física que estudia los cuerpos que se encuentran en reposo, o sobre los cuales actúan
fuerzas y momentos cuyas resultantes son igual a cero.
CONDICIONES DE
EQUILIBRIO.
A nuestro entorno social podemos encontrar muchas
aplicaciones de las condiciones de
equilibrio, o equilibrio estático, desde simples objetos sujetados a las losas o
techos de las casas como focos o lámparas hasta la colocación de grandes
espectaculares, semáforos, estructuras de puentes o edificios.
Existen dos condiciones para el estudio de los cuerpos en equilibrio, las cuales veremos a continuación
PRIMERA CONDICIÓN.
La primera condición de equilibrio establece que:
“Para que un cuerpo este en equilibrio de traslación, la
resultante de todas la fuerzas que actúan sobre él debe ser cero”.
∑F = 0
En otras palabras, la suma de todas las fuerzas que actúan
sobre el cuerpo en el eje de las ordenadas y las abscisas debe ser cero.
∑Fx = 0
∑Fy = 0
Pasos para resolver
problemas de la primera condición del equilibrio:
1. Considere todas las fuerzas que actúan sobre el cuerpo en
cuestión.
2. Traza un diagrama de cuerpo libre y establece un sistema
de coordenadas cartesianas.
3. Lleva a cabo la descomposición de las fuerzas sobre los
ejes X y Y.
4. Iguala a cero la suma algebraica de las componentes
rectangulares sobre cada eje (primera condición del equilibrio).
5. Resuelve el sistema de ecuaciones, y determina las incógnitas
del sistema.
EJEMPLO: PRIMERA CONDICIÓN DE EQUILIBRIO.
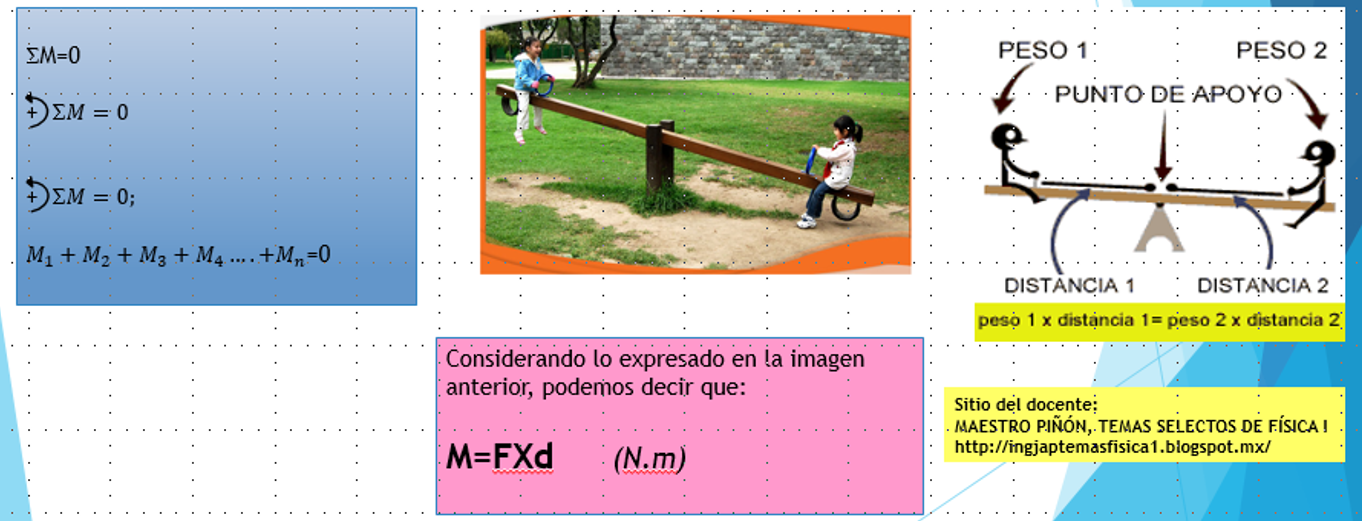
SEGUNDA CONDICIÓN
Establece que: “para que un cuerpo esté en equilibrio de
rotación, la suma de los momentos o torcas de las fuerzas que actúan sobre él
respecto a cualquier punto debe ser igual a cero”.
∑M = 0
VIDEO
CUERPOS EN EQUILIBRIO.
EJERCICIO DE LA SEGUNDA CONDICIÓN DE EQUILIBRIO.
REFERENCIAS Y FUENTES BIBLIOGRÁFICAS .
Pérez Montiel, H. (2014). TEMAS SELECTOS DE FÍSICA. México: Patria
MOVIMIENTO CIRCULAR UNIFORME (MCU), y
MOVIMIENTO CIRCULAR UNIFORMEMENTE ACELERADO (MCUA)
El
movimiento circular uniforme es aquel en el que los móviles se desplazan sobre
una trayectoria circular (una circunferencia o un arco de la misma) a una
velocidad constante.
este tipo de movimiento es muy similar al
movimiento rectilíneo uniforme, pero evidentemente la trayectoria en este
movimiento(MCU) es de manera circular.
Para su estudio, este tipo de movimiento se divide o
clasifica, en movimiento circular uniforme (MCU), y movimiento circular uniformemente
acelerado (MCUA).
Se consideran dos velocidades, la rapidez con que varía el
ángulo en el giro y la rapidez del desplazamiento del móvil sobre la
circunferencia. Estas velocidades se denominan angular y tangencial
respectivamente.
Velocidad angular en movimiento circular uniforme.
Primeramente trataremos el MCU, en el cual, su velocidad angular es la rapidez con la que varía el ángulo en el tiempo y se mide en radianes / segundos. Recordemos que 2 π radianes es igual a 360°.
Si por ejemplo el
ángulo es de 360 grados (una vuelta) y se tarda un segundo en completarla, la
velocidad angular es: 2 π [rad/s].
Si se dan dos vueltas en un segundo la velocidad
angular es 4 π [rad/s]. Si se da media vuelta en dos segundos es 1/2 π
[rad/s]. La velocidad angular se calcula como la
variación del ángulo sobre la variación del tiempo.
La velocidad lineal o tangencial en
el MCU.
La velocidad tangencial es la velocidad del
móvil (distancia que recorre en el tiempo).
Por lo tanto para distintos radios y a la
misma velocidad angular, el móvil se desplaza a distintas velocidades
tangenciales. A mayor radio y a la misma cantidad de vueltas por segundo, el
móvil recorre una trayectoria mayor, porque el perímetro de esa circunferencia
es mayor y por lo tanto la velocidad tangencial también es mayor. .
La velocidad tangencial se mide en unidades de
espacio sobre unidades de tiempo, por ejemplo [m/s], [km/h], etc. Se calcula
como la distancia recorrida en un período de tiempo.
Para calcular la
velocidad tangencial se multiplica la velocidad angular por el radio.
V = ω.r
V = Velocidad tangencial [m/s] ω = Velocidad angular = 2 π f [rad/s] r = Radio de giro [m]
MOVIMIENTO CIRCULAR UNIFORMEMENTE ACELERADO.
Este
tipo de movimiento se presenta cuando una partícula o cuerpo sólido describe
una trayectoria circular aumentando o disminuyendo la
velocidad de forma constante en cada unidad de tiempo. Es decir, la partícula
se mueve con aceleración constante.
En la figura se observa un ejemplo, en donde la velocidad aumenta
linealmente o tangencialmente respecto a un periodo de tiempo. Suponiendo
que el tiempo que tarda en llegar del punto P1 a P2 sea una unidad de tiempo, la partícula viaja
con una aceleración tangencial uniforme v, e incrementándose
esa cantidad en cada unidad de tiempo.
Al analizar este tipo de movimiento nos daremos cuenta que tiene mucha
similitud con el movimiento rectilíneo uniformemente acelerado (MRUA), con la
diferencia a tomar en cuenta que la trayectoria en el MCUA es circular. Por
tanto las formulas son similares y quedan definidas de la siguiente manera.
Para determinar el desplazamiento angular tenemos las siguientes expresiones.